1- Plan de câblage
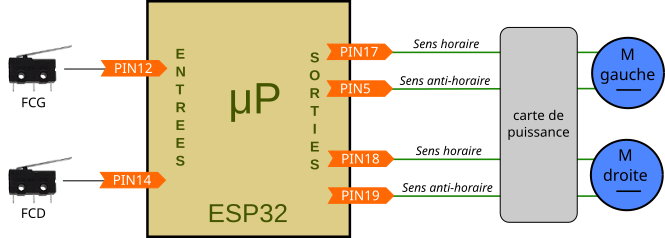
Le plan de câblage permet de déterminer où sont branchés les capteurs et actionneur sur le micro-processeur.
Ce schéma est très utile pour les techniciens qui interviennent sur le rover.
2- Comprendre comment coder le fonctionnement des moteurs
Principe de la commande d'un moteur
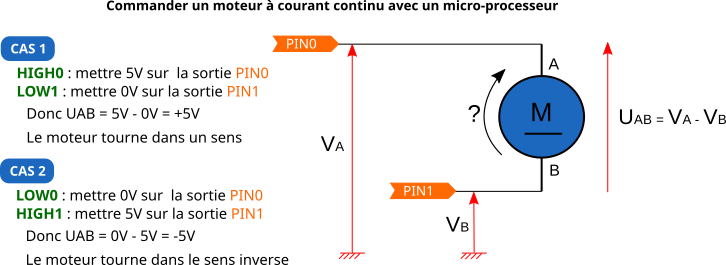
Chaque moteur du rover doit pouvoir tourner dans les deux sens de rotation pour permettre de déplacer le rover en avançant ou en reculant.
Le schéma ci-dessous illustre comment y parvenir avec un moteur à courant continu.
Appliquer le principe du codage au rover
Dans le cas de notre rover, le tableau suivant indique l'état de fonctionnement d'un moteur à courant continu en fonction de la tension appliquée sur chacun des fils du moteur :
| VA | VB | état de fonctionnement |
| 0V | 0V | Arrêt moteur |
| 5V | 0V | Sens horaire (vue de l'extérieur du rover) |
| 0V | 5V | Sens anti-horaire (vue de l'extérieur du rover) |
| 5V | 5V | Arrêt moteur |
table de vérité du fonctionnement du moteur en fonction des tensions appliquées sur les fils
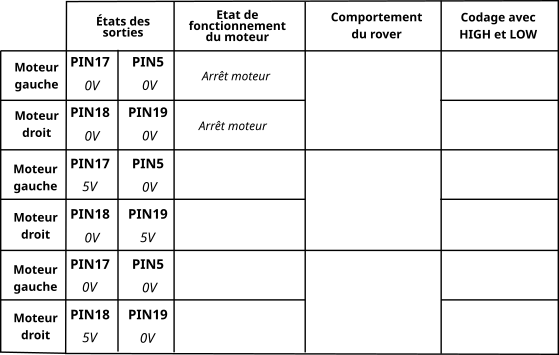
- Compléter en premier la colonne de l'état de fonctionnement de chaque moteur en s'aidant des informations ci-dessus.
- Compléter ensuite la colonne relative au comportement du rover.
- Enfin, dernière colonne, déterminer le codage des sorties avec HIGH et LOW