1- Contexte
Il existe plusieurs types de moteur électrique. Le moteur pas à pas à l'avantage de pouvoir être commandé en position de manière très précise.
Il est facile de les reconnaître : ils ont au moins 4 fils pour les alimenter.
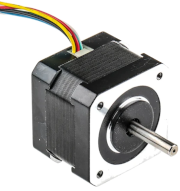
Les imprimantes 3D sont la plupart du temps commandées avec ces moteurs.
Dans le cas de la commande de la position d'un panneau solaire, la poursuite de la course du soleil se fait facilement avec un moteur pas à pas.
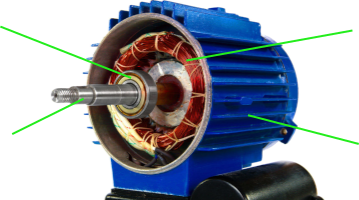
2-1 Principe d'un moteur électrique
Il faut d'abord comprendre comment un moteur arrive à tourner :
Lorsque l'on fait passer un courant électrique dans un fil électrique enroulé comme une bobine, cela produit un champ électromagnétique.
Un champ électromagnétique est similaire à celui produit par un aimant : si on approche 2 aimants du côté des pôles nord, ils vont se repousser.
Une force est donc créée qui permet de produire un mouvement.
Donc pour un moteur, si on dispose plusieurs bobines autour d'un axe : l'axe va se mettre à tourner !
2-2 Dans un moteur pas à pas
Dans un moteur pas à pas, il y a plusieurs bobines électriques qui peuvent être commandées indépendamment les unes des autres.
Suivant la manière d'alimenter la bobine avec une tension continue (par exemple ici avec un générateur de 5V), la polarité dans la bobine sera définie comme suit pour notre exercice :
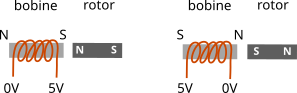
L'exercice suivant montre le principe de l'alimentation des bobines pour orienter le rotor.
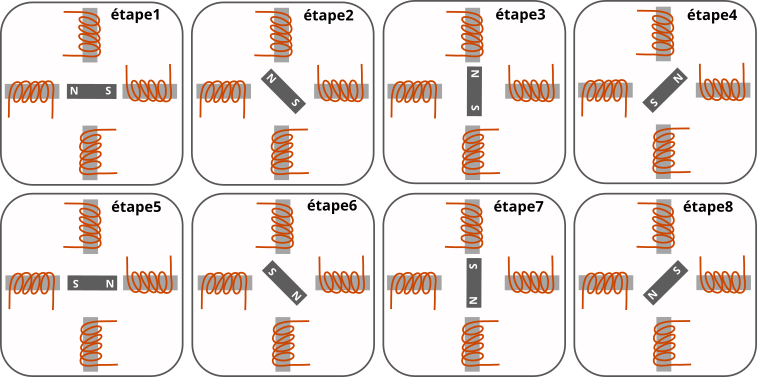
a- Quel est l'intérêt d'alimenter 2 bobines à la fois ?
Une solution pour obtenir des angles de positionnement du rotor plus fins est de multiplier les pôles du rotor comme illustré sur le schéma suivant :

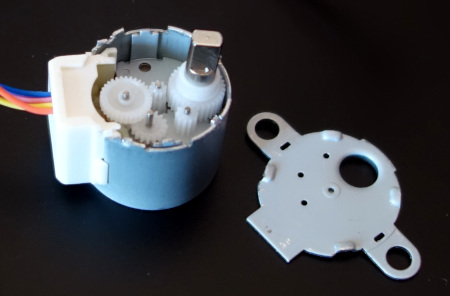
2-3 Moteur pas à pas de la maquette
Il s'agit du moteur pas à pas 28BYJ-48 qui fonctionne sous 5V et qui possède 32 pas par tour.
Il comprend un train d'engrenages de rapport de réduction de 1/16.
Cela permet d'augmenter la précision et le couple, mais cela réduit la vitesse de rotation.
3- Comment représenter informatiquement la séquence de commande des bobines d'un moteur pas à pas ?
Suivant le principe de l'activité sur la commande de l'éclairage de led qui utilise un tableau tab pour allumer des leds, déterminer le tableau sequence qui permettra de commander un moteur pas à pas en utilisant l'exercice précédent.
Proposer alors le code python qui permet de parcourir le tableau sequence en affichant les valeurs dans la console.
L'éditeur Thonny est à utiliser pour vérifier que votre script fonctionne.
4- Programme de base d'un moteur pas à pas
4-1 Plan de câblage
Les 4 fils du moteur sont reliés par l'intermédiaire d'une carte de puissance sur les entrées 17-5-18-19.
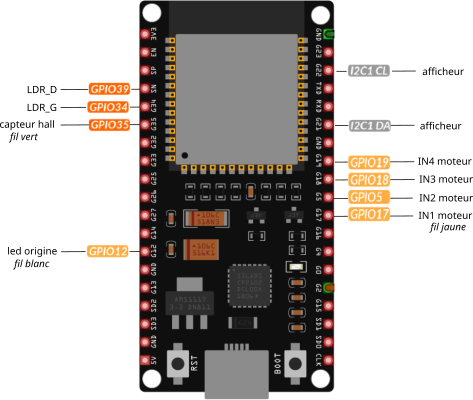
ATTENTION : IL EST IMPÉRATIF DE BRANCHER L'ALIMENTATION 12V
4-2 Programme de base
Voici le programme de départ :
from machine import Pin
from time import sleep
#déclaration des variables et des sorties
IN1 = Pin( ??? ,Pin.OUT)
IN2 = Pin( ??? ,Pin.OUT)
IN3 = Pin( ??? ,Pin.OUT)
IN4 = Pin( ??? ,Pin.OUT)
pins = [IN1, IN2, IN3, IN4]
sequence = [[0,0,0,0],[0,0,0,0],[0,0,0,0],[0,0,0,0]]
#fonction pour arreter la moteur
def stop():
for i in range(len(pins)):
pins[i].value(0)
sleep(0.001)
#première boucle
for t in range(200):
#deuxième boucle
for step in sequence:
for i in range(len(pins)):
pins[i].value(step[i])
sleep(0.001)
sleep(0)
stop()Faire les exercices suivants pour permettre de compléter les lignes du programme ci-dessus.
a- En utilisant le plan de câblage, compléter la déclaration des sorties pour commander le moteur pas à pas en mettant le numéro de broche.

b- On va commander le moteur en activant qu'une bobine à la fois : par convention un 0 correspond à 0V et un 1 à +5V.
Placer les 1 aux bons endroits dans le tableau pour alimenter les bobines les unes après les autres.

c- A quoi sert la première boucle ? Modifier le commentaire du programme
d- A quoi sert la deuxième boucle ? Modifier le commentaire du programme
5- Analyses et améliorations
5-1 Rapport de réduction de la maquette
- Il y a 2 engrenages : quand le grand fait un tour, le petit en fait combien ? Il y a des repères pour vous aider à compter. Diviser le nombre de tours du petit engrenage par celui du plus grand.
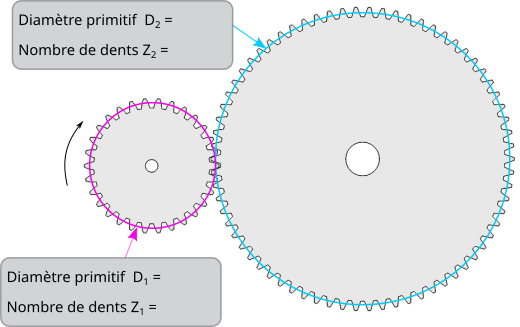
- Mesurer le diamètre primitif de chaque engrenage et diviser D1 par D2.
- L'engrenage grand possède 96 dents, compter le nombre de dents du petit engrenage. Faites la division Z1 par Z2.
=> Que peut-on en conclure ?
Compléter le schéma suivant pour vérifier vos mesures.
- Mettre les mesures de D1 et D2 avec les unités en mm, sans mettre d'espace.
- Déterminer le sens de rotation du grand engrenage en fonction du sens indiqué sur le petit en déplaçant la bonne flèche.
 anti-horaire
anti-horaire horaire
horaire=> Si on souhaite que le sens de rotation du moteur soit le même que le dernier engrenage, que faudrait-il modifier ?
5-2 Déterminer le nombre de pas pour faire un tour complet du grand engrenage
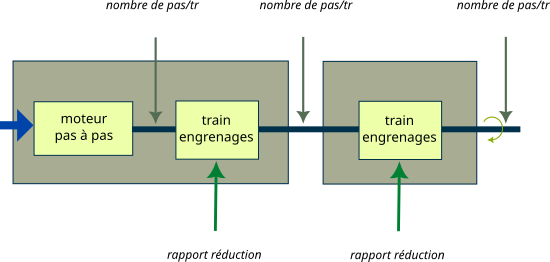
Compléter le schéma qui détaille la chaîne d'énergie en mettant en évidence le moteur électrique, son train d'engrenages associé et les deux engrenages de la maquette.
Les caractéristiques du moteur pas à pas ont été données précédemment.
5-3 Vitesse de rotation
- La vitesse de rotation que vous voyez est à son maximum : comment peut-on ralentir ?
- Le soleil ne va pas si vite, comment peut-on imaginer de gérer une vitesse aussi lente ?
5-4 Sens de rotation
- Comment faire tourner dans le sens inverse le moteur ?
- Réaliser un programme de telle sorte que :
- une première boucle fasse tourner le moteur dans un sens,
- une seconde boucle fasse tourner dans l'autre sens pour revenir à son point de départ,
- en dernier, appeler la fonction pour arrêter l'alimentation de toutes les bobines.