
Le rover des classes de troisième, est équipé de deux roue motrices et d'une roue folle, comme celle que l'on trouve sur un charriot de supermarché. Chaque roue motrice est actionnée par un moteur électrique par l'intermédiaire d'un train d'engrenages permettant de démultiplier la vitesse de rotation du moteur.
Le rover doit se déplacer sans se bloquer. Deux fin de course permettent de détecter un obstacle à gauche ou à droite. En fonction de cela, le micro-contrôleur enverra un ordre aux moteurs par l'intermédiaire d'une carte de puissance.
Pour assurer l'autonomie du rover une batterie de 12V 4000mAH fournit l'énergie au rover.
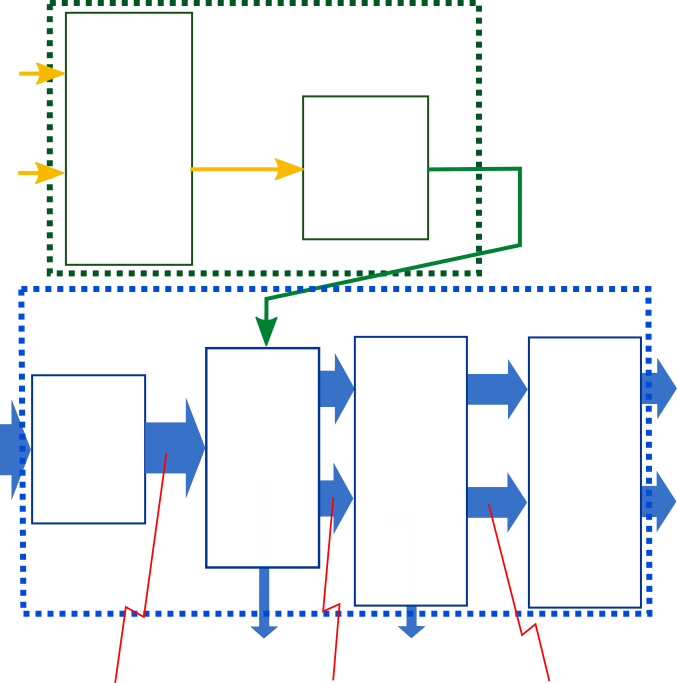
Energie électrique
Acquérir
Alimenter
 Carte de puissance
Carte de puissance Train engrenages
Train engrenages Moteur
MoteurCommande moteurs
Chaîne d'énergie
Energie électrique
Energie cinétique de rotation
Energie thermique
Energie cinétique de rotation
Obstacle
Transmettre
 Fin de courseFin de course
Fin de courseFin de courseEnergie électrique
Micro-contrôleur
MoteurObstacle
Convertir
Traiter
Train engrenagesChaîne d'information
Distribuer
 Batterie
BatterieEnergie thermique
Energie cinétique de rotation